
Robot di động đã và đang thay đổi cuộc sống của chúng ta, nhưng làm thế nào để chúng di chuyển thật sự thông minh và linh hoạt? Bài viết này được xây dựng dựa trên một nghiên cứu đột phá từ nhóm nghiên cứu VISI AI Vietnam, giúp ta khám phá cách họ tạo ra một bộ điều khiển AI mới để giải quyết những thách thức lớn nhất trong lĩnh vực xe tự hành. Để tìm hiểu chi tiết hơn, bạn có thể tham khảo bài báo khoa học gốc tại đây.
Trong thế giới hiện đại, robot di động không còn là hình ảnh xa vời trong phim khoa học viễn tưởng. Chúng hiện diện khắp nơi: từ robot hút bụi trong nhà, xe giao hàng tự động ở các khu công nghiệp, cho đến những chiếc xe tự lái đang dần thay đổi bộ mặt giao thông.
Tuy nhiên, để một cỗ máy có thể di chuyển một cách trôi chảy và thông minh như con người không phải là điều dễ dàng. Chúng phải đối mặt với vô vàn thách thức: làm sao để bám sát một con đường đã định, tránh chướng ngại vật bất ngờ, và vẫn giữ được sự ổn định ngay cả khi gặp gió lớn hay đường trơn trượt?
Đây chính là câu hỏi lớn mà các nhà khoa học đang miệt mài tìm lời giải. Gần đây, một nghiên cứu đột phá đã đề xuất một giải pháp đầy hứa hẹn. Bài viết này sẽ đưa bạn khám phá bí mật đằng sau một bộ điều khiển AI mới, giúp robot di động ba bánh (3WMR) trở nên linh hoạt và thông minh hơn bao giờ hết.
Hãy tưởng tượng bạn đang lái một chiếc xe trên đường. Bạn phải liên tục xử lý thông tin: mắt nhìn đường, tay điều chỉnh vô lăng, chân đạp ga hoặc phanh. Một người lái xe robot cũng phải làm điều tương tự, nhưng với một “bộ não” là thuật toán và các cảm biến.
Đối với robot di động ba bánh (3WMR), những thách thức này trở nên phức tạp hơn bởi cấu trúc vật lý đặc thù của nó. Vấn đề không chỉ là di chuyển, mà còn là:
Một bộ điều khiển thông thường có thể gặp khó khăn trong việc xử lý đồng thời tất cả các yếu tố này.
Để giải quyết những vấn đề trên, các nhà nghiên cứu đã phát triển một bộ điều khiển thích ứng mới, gọi là Bộ điều khiển ABHSMC (viết tắt của Adaptive Backstepping Hierarchical Sliding Mode Controller). Tên gọi nghe có vẻ phức tạp, nhưng về cơ bản, nó giống như một người lái xe cực kỳ thông minh, biết cách tự học và điều chỉnh để lái xe an toàn nhất.
Giải pháp này được xây dựng dựa trên sự hợp tác của hai kỹ thuật điều khiển tiên tiến:
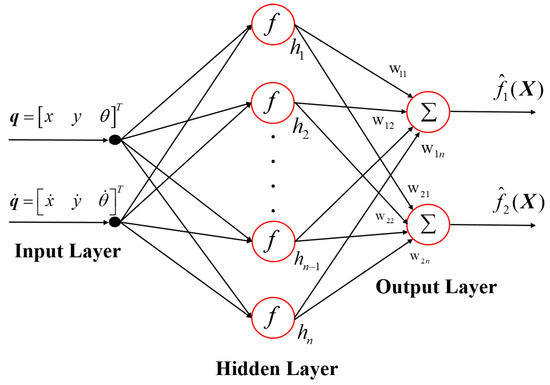
Điểm đặc biệt nhất của bộ điều khiển này là sự góp mặt của mạng nơ-ron RBF (Radial Basis Function). Mạng nơ-ron này có một khả năng kỳ diệu: nó có thể tự động ước tính và điều chỉnh các thông số của bộ điều khiển.
Nói một cách đơn giản, nó hoạt động như một “trợ lý AI” luôn luôn quan sát và học hỏi, giúp bộ điều khiển thích ứng ngay lập tức với bất kỳ thay đổi nào của robot hoặc môi trường. Nhờ có RBF, bộ điều khiển ABHSMC trở nên vô cùng linh hoạt, mượt mà và chính xác.
Một bộ điều khiển thông minh thôi chưa đủ. Để một chiếc xe tự lái hoạt động hiệu quả, nó cần một hệ thống dẫn đường hoàn chỉnh. Các nhà nghiên cứu gọi mô hình này là ABHSMC navigation stack (tạm dịch: Hệ thống dẫn đường ABHSMC).
Hệ thống này hoạt động theo ba bước:
Sự kết hợp này tạo ra một hệ thống hoàn hảo: A* lo phần “chiến lược”, TEB lo phần “chiến thuật”, và ABHSMC chính là “người thực thi” tài ba, đảm bảo mọi thứ diễn ra trơn tru.
Để chứng minh hiệu quả của giải pháp này, các nhà nghiên cứu đã tiến hành hai giai đoạn thử nghiệm chính:
Nghiên cứu này đã mở ra một hướng đi mới đầy hứa hẹn cho ngành công nghiệp robot di động và xe tự lái. Bằng việc kết hợp các kỹ thuật điều khiển tiên tiến với sức mạnh học hỏi của mạng nơ-ron, bộ điều khiển ABHSMC đã chứng minh khả năng vượt trội trong việc điều khiển robot di chuyển một cách chính xác, ổn định và linh hoạt.
Những thành tựu này không chỉ giúp robot trở nên thông minh hơn, mà còn đặt nền móng cho một tương lai tự động hóa an toàn hơn. Từ xe giao hàng tự động trong nhà máy, robot hỗ trợ y tế, đến những chiếc xe tự lái trên đường phố, sự chính xác và linh hoạt của các hệ thống điều khiển AI sẽ là chìa khóa để kiến tạo một cuộc sống tiện nghi và hiệu quả hơn cho tất cả chúng ta.
Để cập nhật thông tin, kiến thức về Trí tuệ nhân tạo của VisiAI